
Autonomous Pick-and-Place System
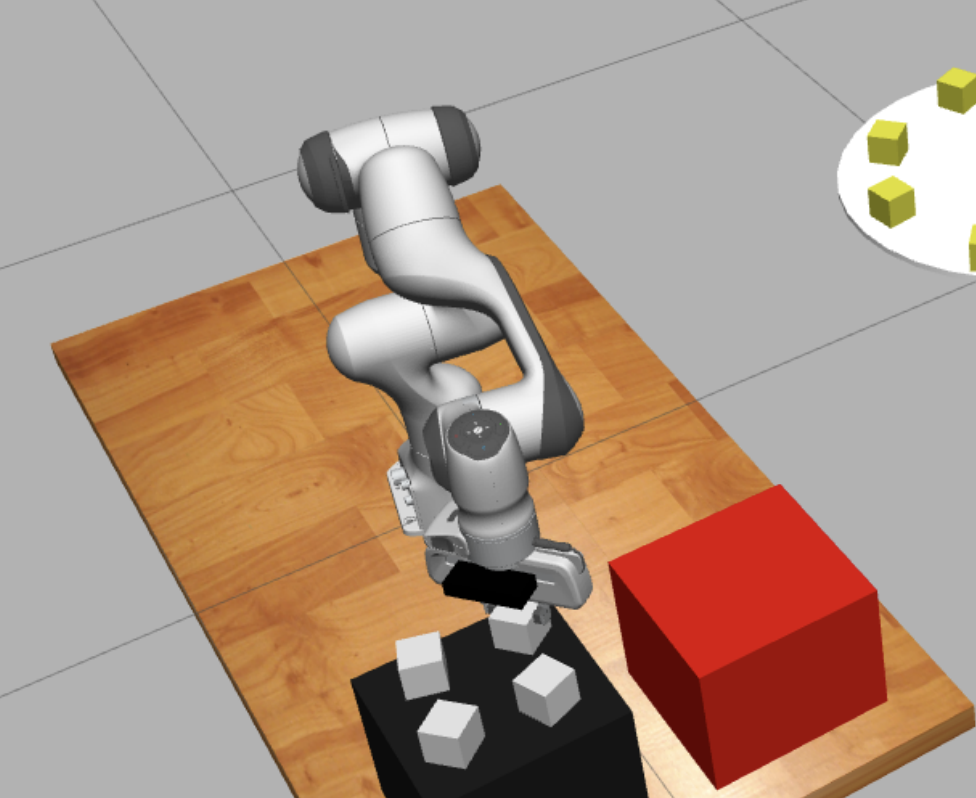
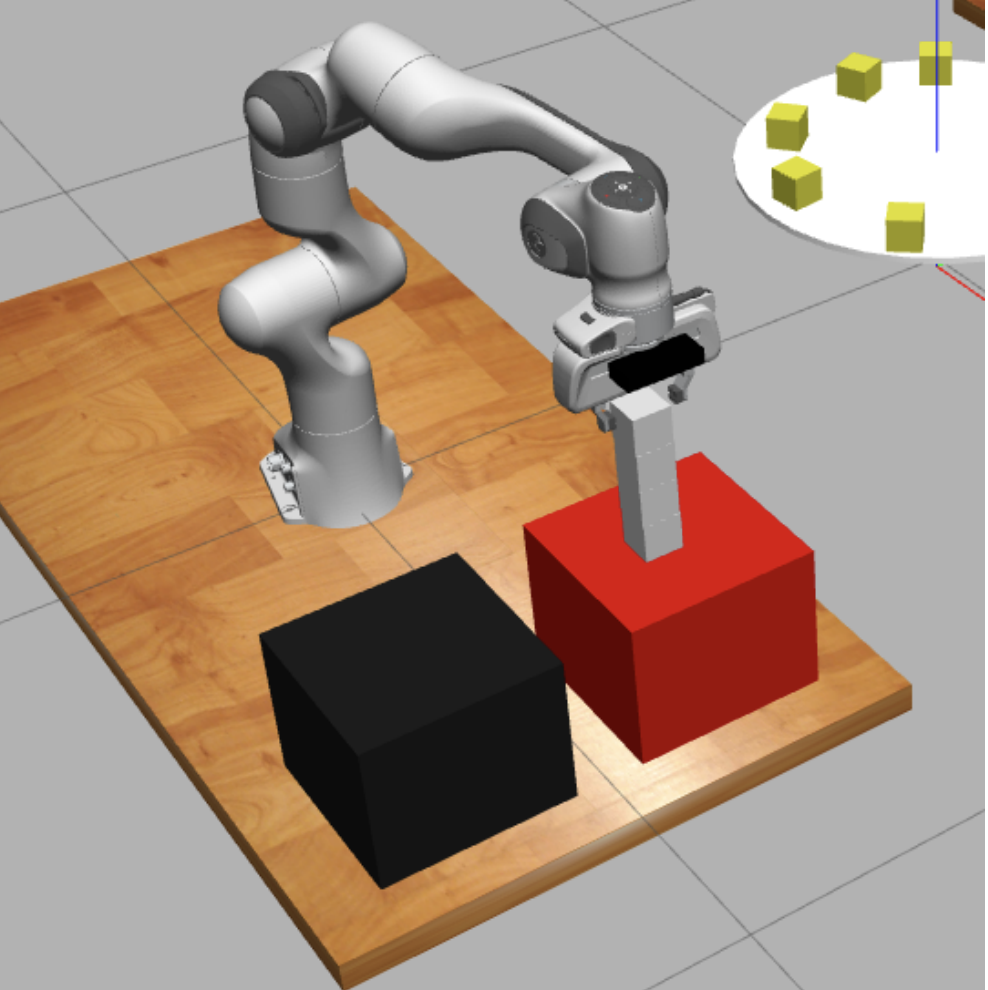
Developed a robotic pick-and-place system using the Franka Emika Panda arm capable of identifying, tracking, and stacking both stationary and moving blocks. The project integrated computer vision, motion planning, and feedback control for robust and adaptive manipulation.

Highlights
- Object Detection
- Employed AprilTags and OpenCV for real-time block pose estimation
- Dynamically adjusted alignment to reduce grasping errors
- Control System
- Implemented a closed-loop pipeline integrating:
- Pose correction
- Pseudoinverse-based inverse kinematics
- Gripper force feedback for grasp validation
- Implemented a closed-loop pipeline integrating:
- Static Block Handling
- Averaged multiple visual frames to reduce sensor noise
- Re-verified block identity before each grasp
- Achieved 100% grasp success in simulation
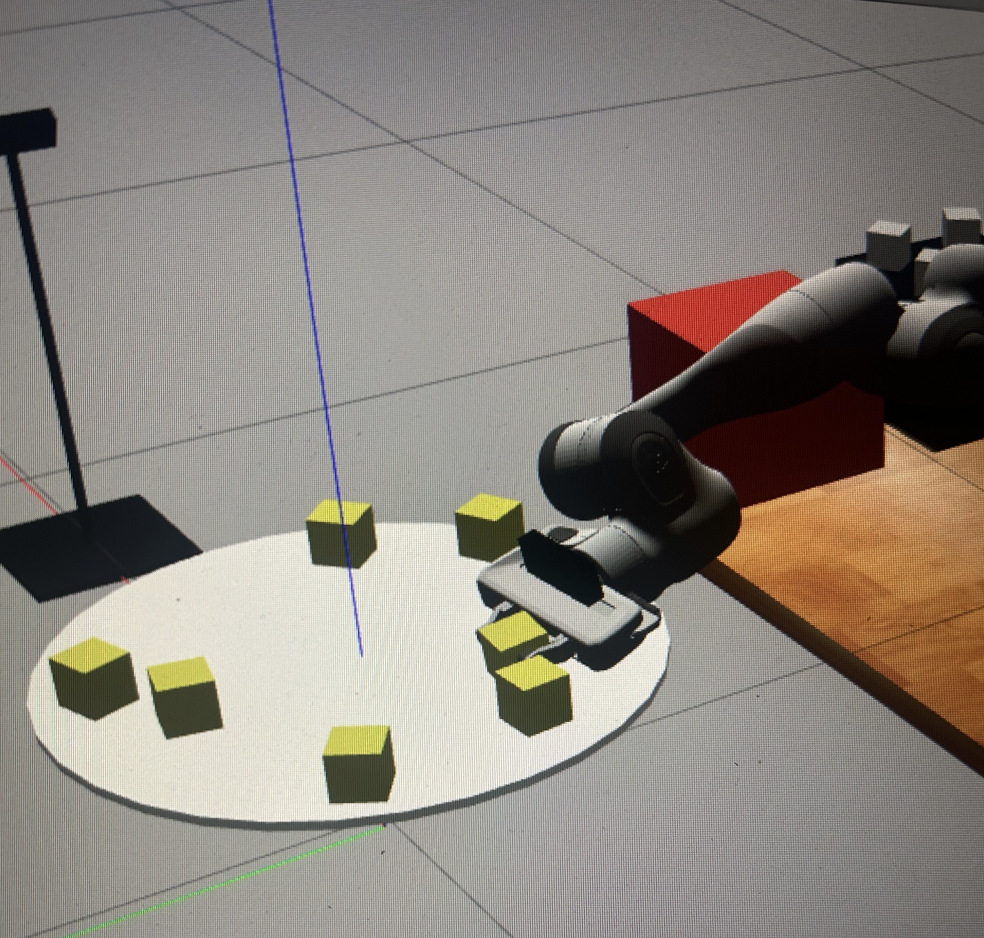
- Dynamic Block Handling
- Designed pre-programmed sweeping trajectories for pickup from a rotating platform
- Achieved 71.4% success rate with minimal latency in simulation
| 👉 GitHub Repository | 📄 Full Project Report (PDF) |