
Autonomous Rovers
1. Senior Capstone Project

For my undergraduate capstone, I was the mechanical lead and co-lead programmer for a fully autonomous rover built over two quarters in a team of 5.
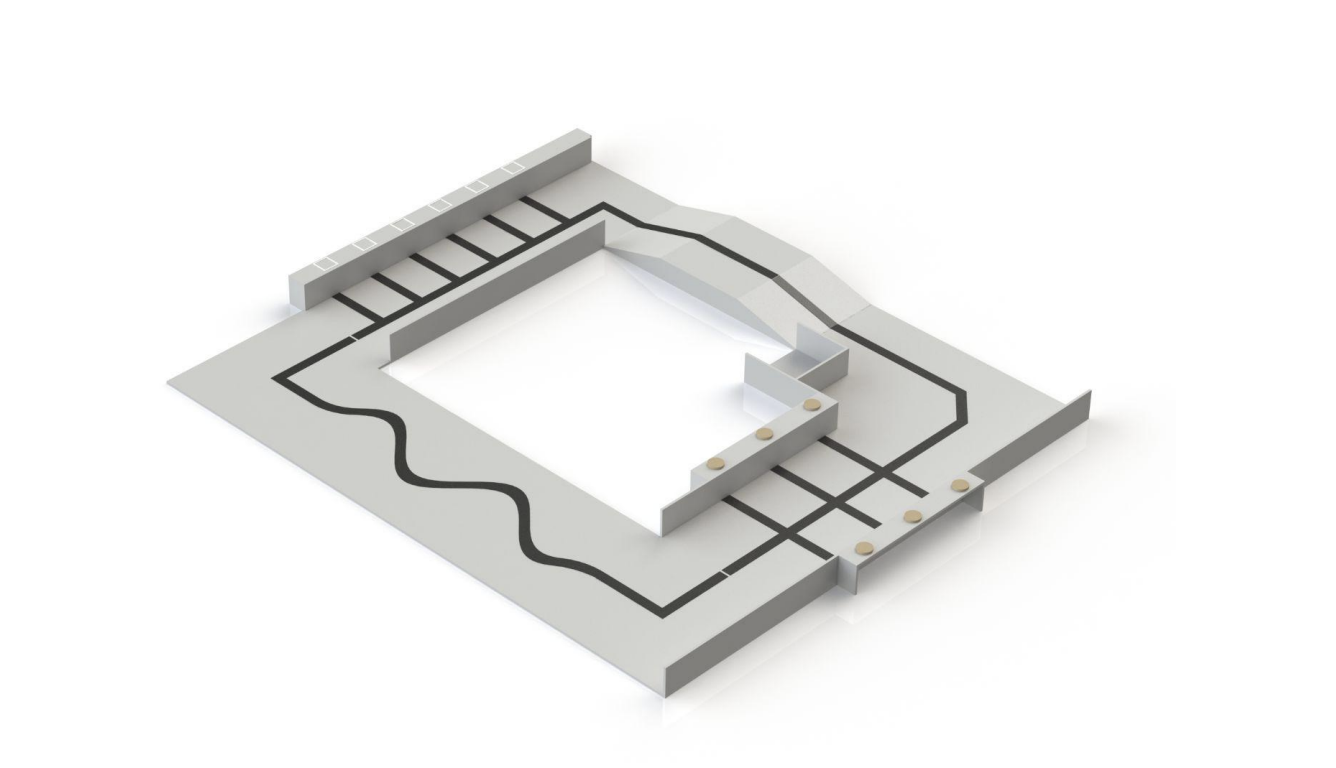
The challenge: Navigate a black-line course with curves, climbs, and obstacles with IR/ultrasonic sensors, pick up/stack numbered discs (“burger patties”) based on dice rolls, and doing this while in outdoor condtions, surviving a 6 inch drop test and completing the course under 5 minutes.
Highlights:
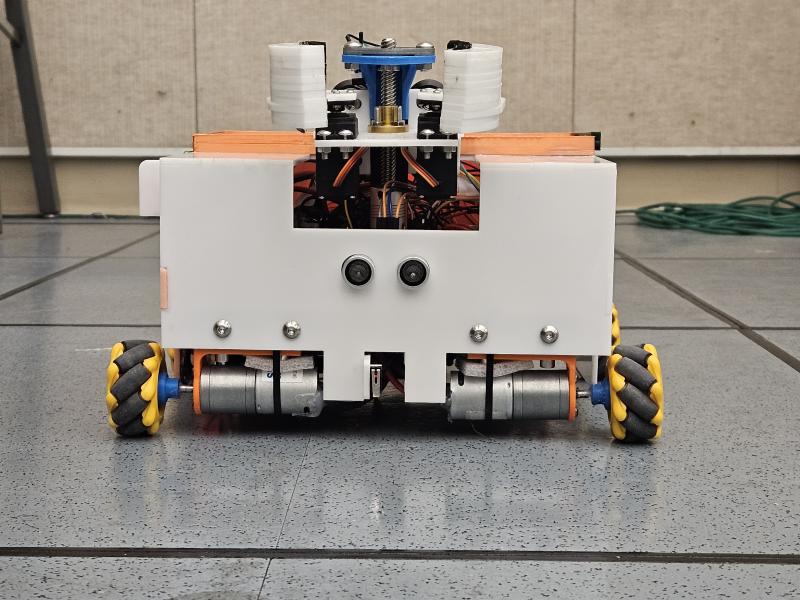
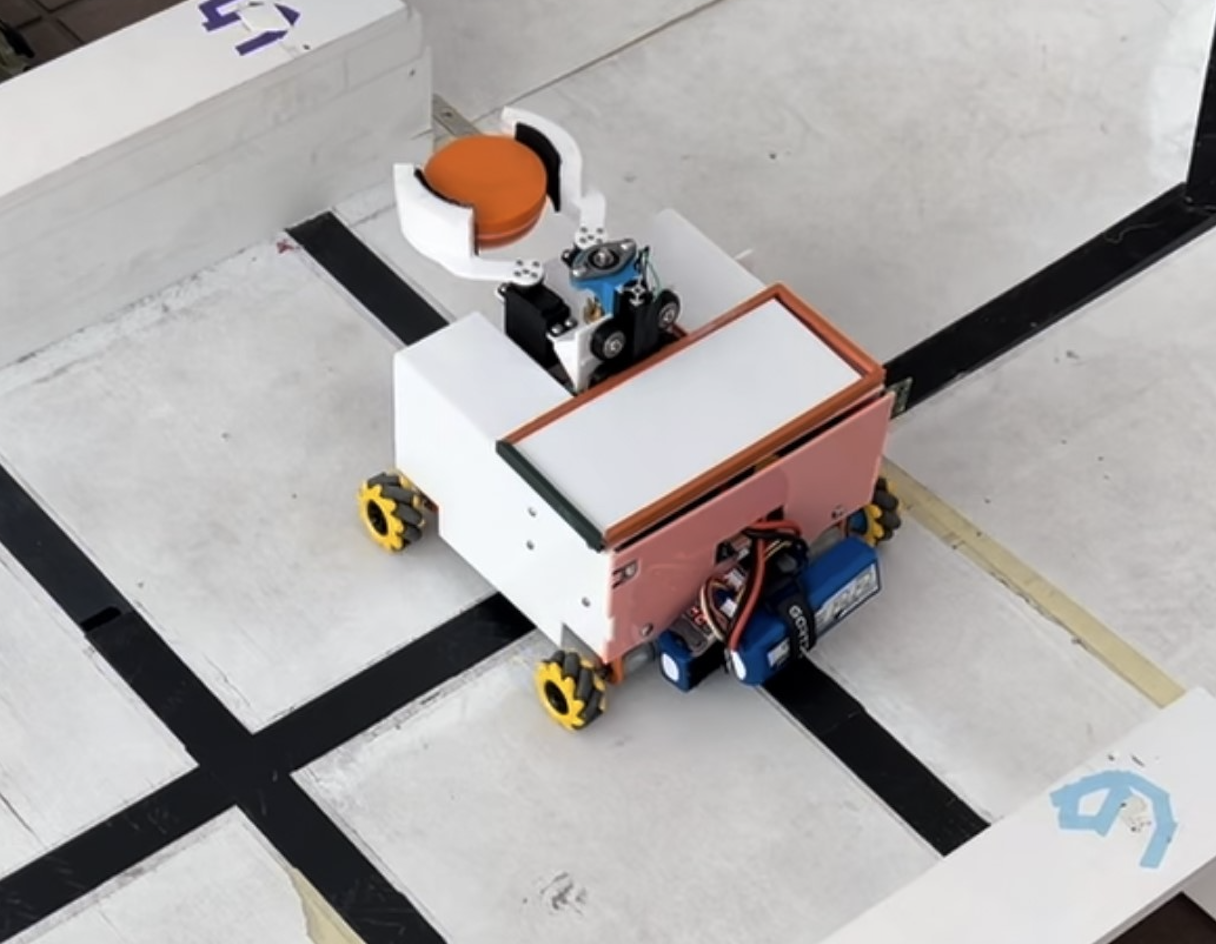
- Drive System: 4-wheel mecanum drive for full omnidirectional motion
- Manipulator: Stepper-driven vertical carriage and dual-servo laser-cut claw for stacking
- Perception:
- IR Sensor Array for line-following and intersection detection
- Ultrasonic Sensor for obstacle avoidance
- Camera + Raspberry Pi Zero 2 W for dice number detection** via OpenCV
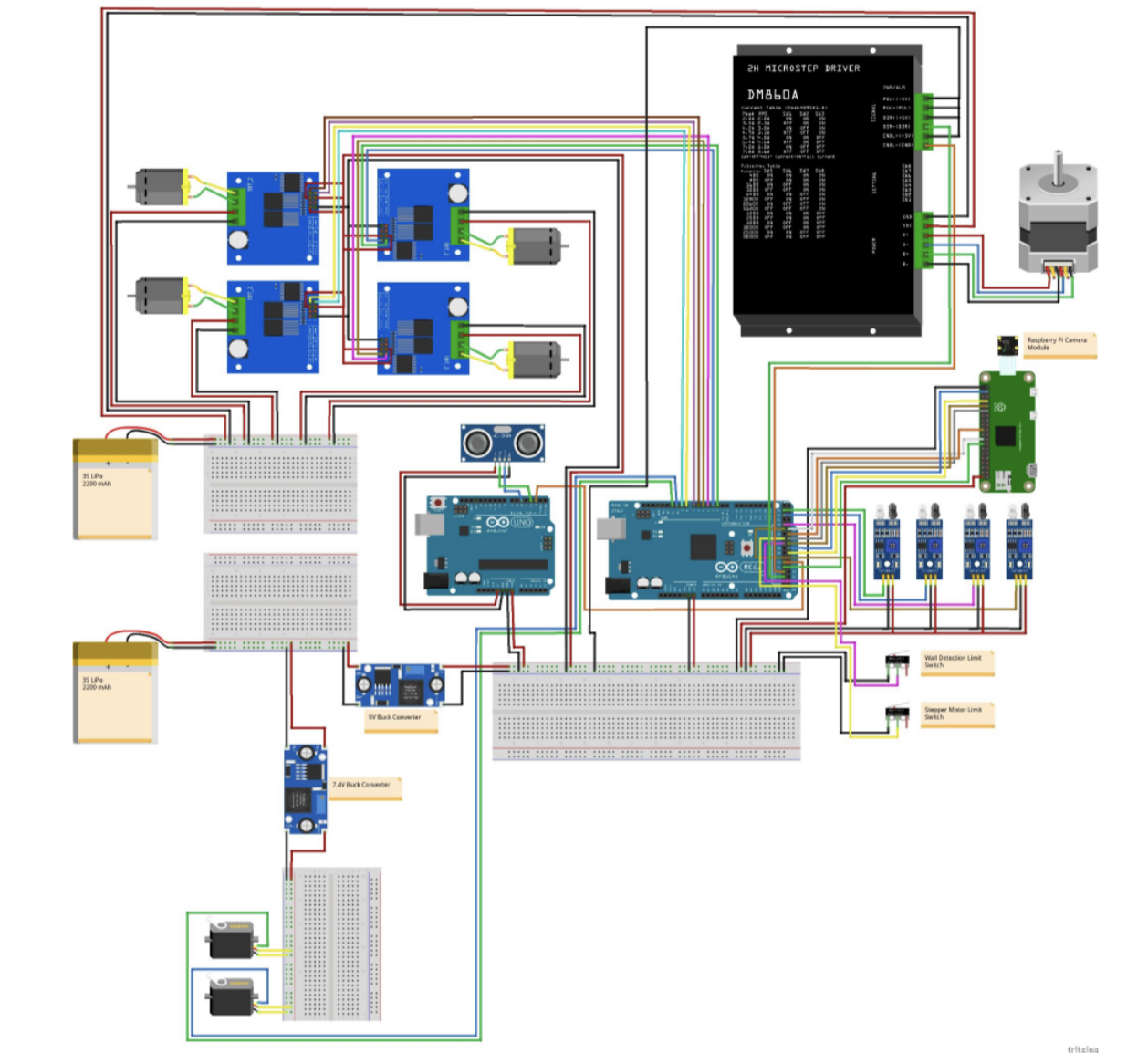
- Control:
- Dual-Arduino architecture to split control and perception logic
- Custom finite state machine for real-time sequencing of navigation, pick-up, and delivery tasks
Achievements:
- Only team to implement camera-based die recognition
- Successfully completed full challenge with functional delivery and stacking
- Designed within a $500 budget, using V-slot aluminum extrusion and modular acrylic mounts
| 👉 [Code Available upon Request] | 📄 Final Presentation PDF |
2. Pink Lemonade (Intro Robotics Project)
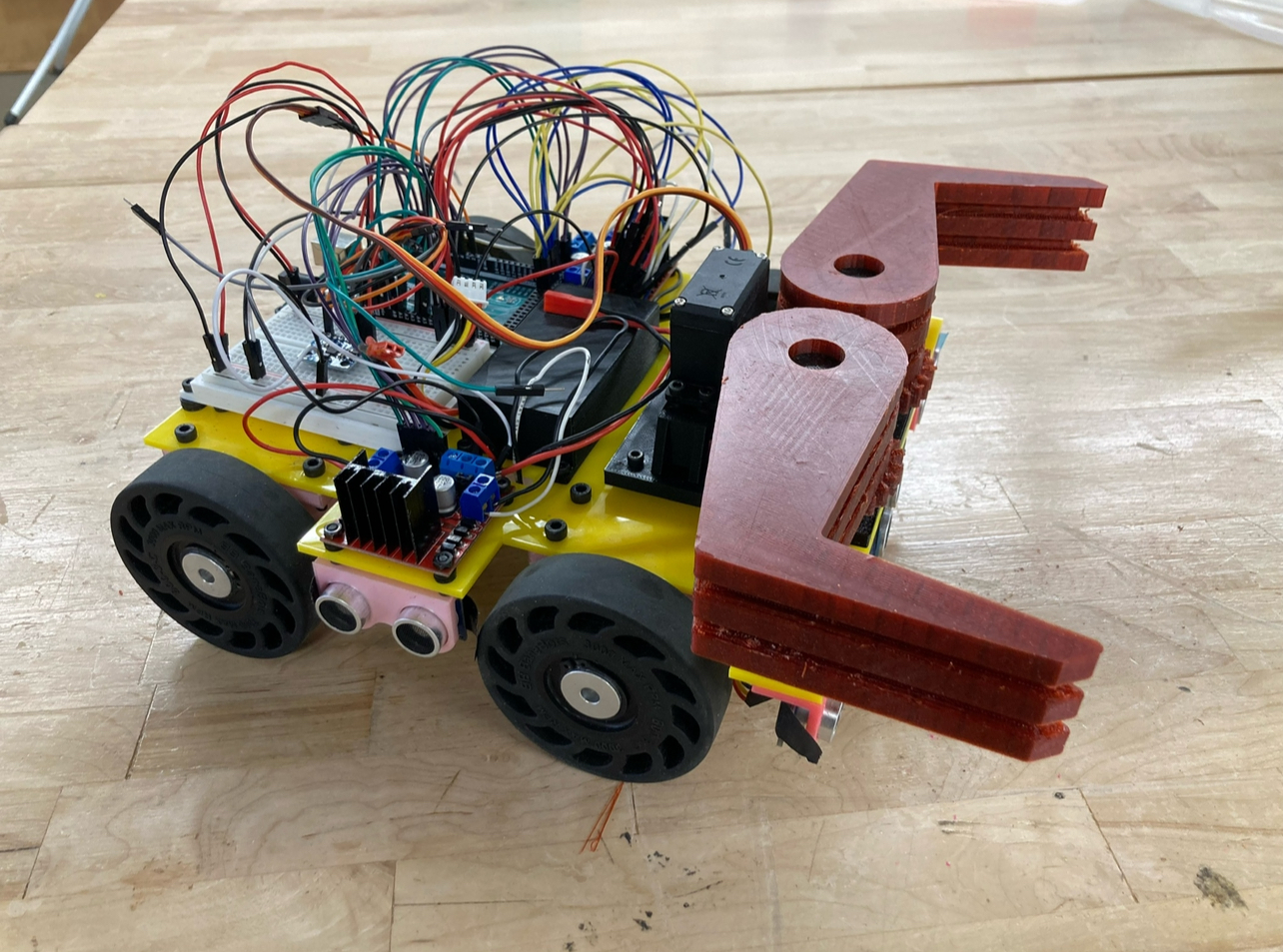
This was my first hands-on robotics experience. Our team built an autonomous rover designed to navigate a basic obstacle course and retrieve a cylindrical object. I led the mechanical design using SolidWorks, creating a chassis that integrated all major components: sensors, motors, battery pack, and claw. Most parts were custom-fabricated using 3D printing and laser cutting at UCLA’s fabrication lab, which also ended up being an introduction to additive manufacturing as well.
Highlights:
- Rubberized gripper mechanism for cylindrical object retrieval
- Autonomous navigation implementation via Arduino and ultrasonic sensing
- Rapid mechanical design prototyping with Prusa Slicer and UCLA makerspace tools
Overall, we finished 2nd in the competition out of 8 other UCLA teams.