
MATLAB Quarter Car Model Controls
Active Suspension System — Quarter-Car Model (MATLAB + Simulink)
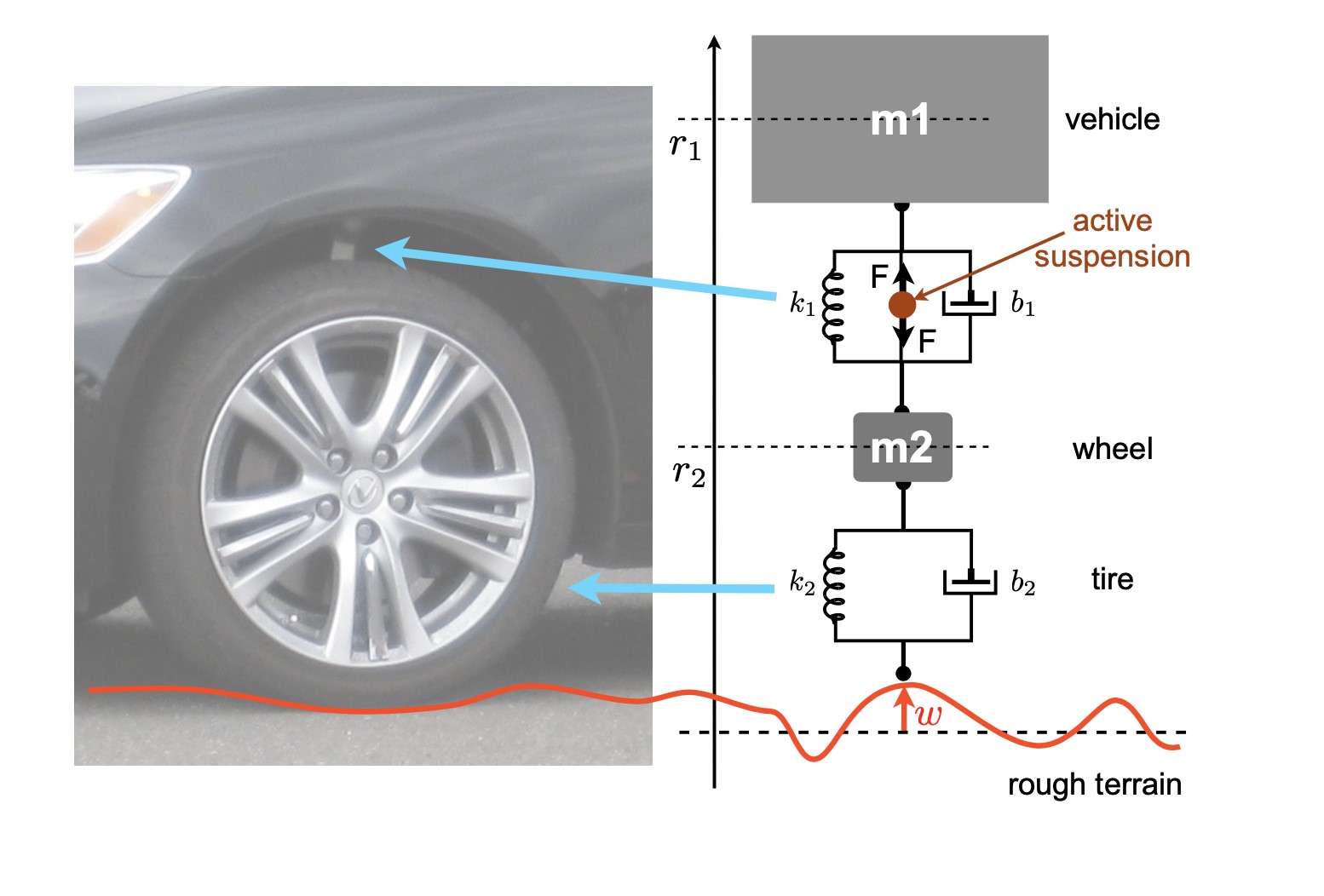
Designed a feedback controller for an active car suspension system using MATLAB and Simulink, with the goal of minimizing vehicle oscillations and thus enhance theoretical passenger comfort.
Highlights
- Built and analyzed a quarter-car suspension model using Laplace transforms and transfer functions.
- Designed classical controllers (Bode, Nyquist, root locus) to meet strict specs: <5% overshoot, <1s settling.
- Tuned system interactively in MATLAB SISOTOOL; achieved smooth, stable ride response to disturbances.